自动驾驶时间同步是保障系统安全可靠运行的底层核心基础,其不仅能确保摄像头、激光雷达等多传感器数据的时空一致性,为传感器融合提供前提,还能保障决策与控制的实时准确性。本篇文章简单介绍时间同步的几种方法以及如何构建自动驾驶系统时间同步方案。
时间同步技术
GPS+PPS
基本原理
GPS 卫星搭载高精度原子钟提供 UTC 时间基准,接收机接收卫星信号后,同步输出两类关键信息:① PPS(每秒脉冲)硬件信号(上升沿与 UTC 整秒对齐);② NMEA/GPRMC 串口数据(含 UTC 时间、经纬度等)。通过 PPS 信号校准本地时钟秒边界,结合 NMEA 数据补充时间戳,实现亚微秒级时间同步。
实现方式
优势与局限
类别 |
具体内容 |
优势 |
1. 全球覆盖,无需依赖地面网络基础设施; 2. 同步精度高(亚微秒级),稳定性强; 3. 适配野外、移动、分布式场景,独立工作能力强; 4. 硬件实现简单,核心依赖 GPS 模块与 PPS 接口。 |
局限 |
1. 依赖 GPS 信号,室内、隧道、高楼遮挡场景效果差; 2. 需设备支持硬件 PPS 接口,部分低成本设备不兼容; 3. 无法实现网络内多设备自动协同同步; 4. 易受电磁干扰,需屏蔽线缆辅助。 |
PTP
基本原理
基于 IEEE 1588 标准,采用主从(Master-Slave)架构实现网络内多设备同步。主时钟(通常绑定 GPS/PPS 高精度源)通过网络发送同步报文,从时钟记录报文收发时间戳,计算传输延迟与时钟偏差,进而校准本地时间。支持软件实现(精度~10μs)或硬件时间戳(精度达纳秒级),网络设备可配置为边界时钟节点、普通时钟节点和透明时钟节点。
实现方式
PTP通过在主从设备之间交互同步报文,并记录下报文发送时间,从而计算网络传输延迟和主从设备间时钟的偏差。PTP定义了四条同步报文:Sync、Follow_Up、Delay_Req、Delay_Resp,精确同步过程如下。
(1)PTP主端口向从端口发送Sync报文,同步记录下Sync发送的时间t1。从端口收到Sync报文后,记录下收到的时间t2。
(2)紧接着主端口将t1时间放到Follow_Up报文发送给从端口,从端口收到此报文后就可以解析出t1,并由此得到第一个方程式:t1+网络延时+时钟偏差=t2。
(3)从端口向主端口发送Delay_Req报文,同步记录下Delay_Req发送的时间t3。主端口收到报文后,记录下收到的时间t4。
(4)紧接着主端口将t4时间放到Delay_Resp报文发送给从端口,从端口收到此报文后就可以解析出t4,并由此得到第一个方程式:t3+网络延时-时钟偏差=t4。
求解方程:网络延时=[(t2-t1)+(t4-t3)]/2;时钟偏差=[(t2-t1)-(t4-t3)]/2
优势与局限
类别 |
具体内容 |
优势 |
1. 支持局域网内多设备自动同步,无需额外硬件连接; 2. 精度可调(亚微秒~纳秒级),适配不同场景需求; 3. 不受 GPS 信号限制,适配室内、遮挡环境; 4. 兼容现有 IP 网络基础设施,部署成本较低。 |
局限 |
1. 依赖网络稳定性,链路拥堵、丢包会影响同步精度; 2. 配置复杂,需专业人员进行主从时钟、TC/BC 参数设置; 3. 跨网段同步需特殊配置边界时钟,扩展性受限; 4. 软件实现精度较低,高精密场景需硬件时间戳支持。 |
gPTP
基本原理
基于 IEEE 802.1AS 标准,是 PTP 针对时间敏感网络(TSN)的优化版本。强制采用 MAC 层硬件时间戳,确保纳秒级精度;简化配置流程,通过优化的最佳主时钟算法(BMCA)实现自动主时钟选择;支持多时间域划分,适配大型系统管理。网络设备可配置为主时钟、从时钟和桥接设备。
与PTP对比核心技术差异
优势和局限
类别 |
具体内容 |
优势 |
同步精度高(纳秒级,ns),确定性强; 全自动配置(BMCA 算法),无需手动干预主时钟; 抗干扰能力强,适配车载、工业电磁环境; 支持多时间域独立同步,便于大型系统管理。 |
局限 |
需支持 IEEE 802.1AS 的专用硬件(TSN 交换机、硬件时间戳模块),成本较高; 仅适用于封闭、可控的 TSN 网络环境,兼容性受限; 技术门槛高,故障排查需专业工具; 不兼容传统IP网络,需重构网络架构 |
自动驾驶系统时间同步方案
PPS+PTP
全域架构下,智驾域控制器因为直接连接GNSS接收机(或内置),而GNSS又是绝佳的时钟源,因此智驾域控制器自然而然成为主时钟节点,中央网关域控制器通过车载以太网主干网串联起其它域控制器,自然而然成为边界时钟的最佳选择,这样在时钟源丢失的时候,边界时钟节点同步主时钟节点的系统时间,仍然可以保持整个全域架构内相对时间一致。
其它域内传感器、执行器的时间同步需求,若没有,此域控制器设计成普通时钟节点即可。如有,可以设计成边界时钟,以保证无时钟源时的相对时间统一。
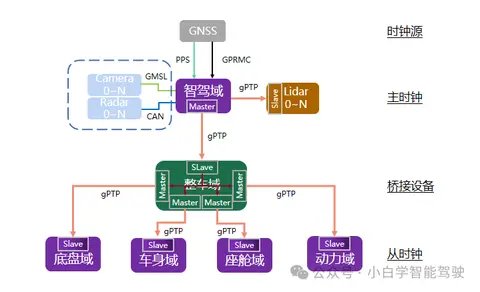
PPS+gPTP
GNSS作为时钟源,智驾域控制器作为主时钟,整车域控制器作为桥接设备,其它域控制器作为从时钟。
PPS+PTP vs PPS+gPTP
适用场景
方案 |
适用场景 |
PPS+PTP |
1. 传统分布式 ECU 架构,非 TSN 车载网络 |
PPS+gPTP |
1. L2 以上自动驾驶,特别是采用中央计算 + 区域控制架构 |
如何选择
PPS+gPTP 是自动驾驶时间同步的未来主流,特别适合 L2 + 自动驾驶和车载 TSN 网络,提供纳秒级精度和高可靠性。PPS+PTP则在传统架构和非车载场景中仍有成本效益优势。
摄像头时间同步方案
PTP/gPTP为基于以太网的时间同步方案,而摄像头属于非车载以太网设备,需要特殊处理。
相机-主控时间同步
可以将相机设置为外触发模式,通过主控给相机外触发脉冲信号。相机拍照时,曝光时刻也会产生脉冲信号发送给主控,主控记录此时系统时间,并将时间戳数据放到相机的图像数据里。
多相机时间同步
首先,域控侧发出的触发信号会发送到主控板上的 GMSL 解串芯片。这对解串芯片与相机端的串行芯片协同工作,通过 GMSL 协议传输高速相机数据和控制信号,从而实现触发信号的透传。
随后,相机端的串行芯片会通过其 GPO(通用输出)引脚将透传的触发信号连接到 CMOS 图像传感器的 FSYNC 时间同步引脚。在这个过程中,ISP(图像信号处理器)扮演着“时间同步协调器”的角色,它虽然不直接接收原始触发信号,但能感知 CMOS 的曝光事件,并可输出精确的同步信号供其他设备使用。
这样,就构建了完整的相机时间同步硬件方案。









